* 이 포스트는 컴퓨터 비젼에 대한 개인 학습용으로 작성한 포스트입니다.
Linear Filtering
새로운 pixel값은 주변 pixel의 weighted sum으로 표현할 수 있다. 이를 Convolution operation이라 한다.

Boundary Issue : boundary 주변에서는 주변 pixel이 정의되지 않음
-> Crop, zero padding, copy edge 등의 다양한 방법들이 있음
Reduce Noise
Image noise models
Additive noise : $I(i, j) = \hat{I}(i, j) + n(i, j)$
Multiplicative noise : $I(i, j) = \hat{i}(i, j) \cdot n(i, j)$
Impulsive noise : 확률에 따라 픽셀 변화 (salt and pepper)
Noise amount : $SNR = \sigma_s / \sigma_n$
RXC image에서,

Noise는 filtering operation을 통해 줄일 수 있다.
Box filter (Average filter)
모든 weight가 같고 합이 1인 nXn filter
-> filter size가 커질수록 noise variance는 작아지고 더 blur해진다. 대신 detail도 사라짐

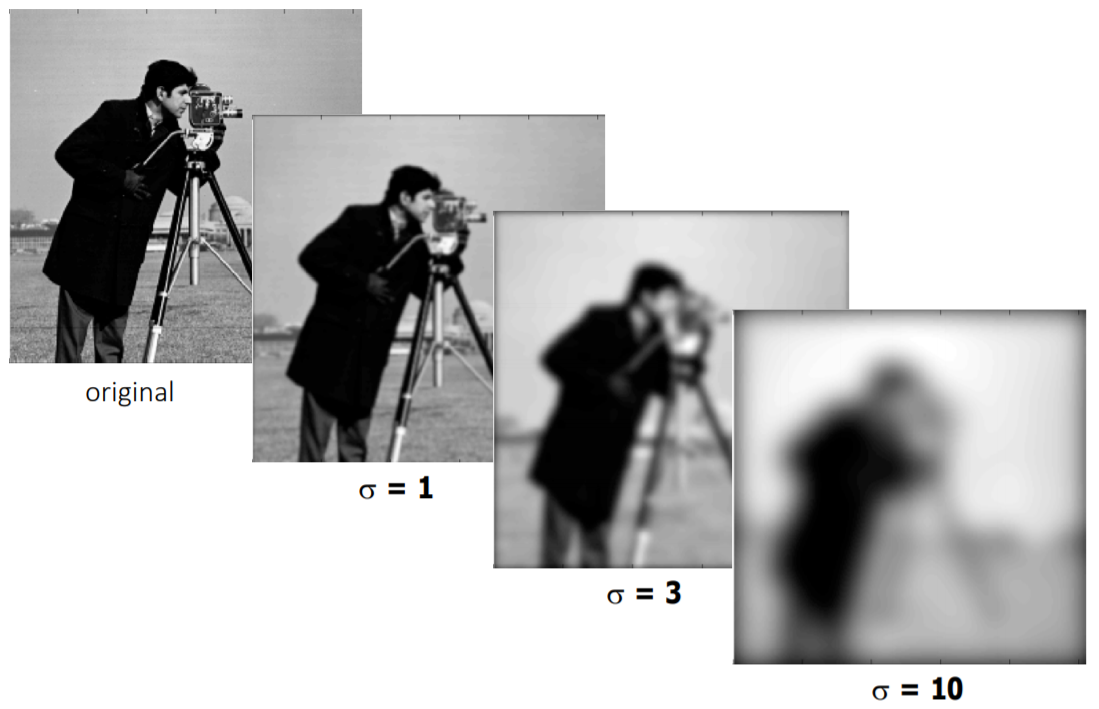
Gaussian filter

Median filter
neighborhood pixel을 정렬한뒤 중앙값을 취함
특정값이 돌출된 것에 강함
edge같은 discontinous 정보 유지
아래는 3개의 filter를 비교한 사진이다.

Edge Aware Filtering
Bilateral filter
위의 Gaussian filter는 위치에 따라 gaussian값이 달라졌지만, intensity 값 차이에도 gaussian을 씌움


Pros : edge 정보를 비교적 잘 보존함.
Cons :
Staircase effect - piece별로 같은 pixel값이 뭉치는 현상,
Over-sharpening effect(Gradient reversal) - gradient sign이 바뀌어 edge에서 반전되는 현상
Non-local mean filter
Neighborhood pixel이 아니라 비슷한 patch를 구하고 (similiarity가 비슷한 부분들) 이를 평균 취함

Guided filter
Guide image를 통해 range정보를 얻어내고 이를 통해 noise를 제거함
ex) noise image와 flash를 터트려 얻어낸 guide image
아래 filter는 guide와 실제 intensity와 linear관계를 갖는다고 모델링하여 만든 filter이다.

Pros : $O(1)$time을 가져 빠르다 (Non-iterative), Gradient reversal을 줄임
Cons : Spatial adaptivity가 약하다, Color model에서 약함
'Basic Learning > Computer Vision' 카테고리의 다른 글
| More Features (0) | 2020.10.08 |
|---|---|
| Edges (0) | 2020.10.08 |
| Color (0) | 2020.09.29 |
| Shape from Shading & Photometric Stereo (0) | 2020.09.20 |
| Radiometry (0) | 2020.09.18 |



